A comprehensive guide to understanding and applying fundamental vector operations in mathematics and physics. Learn about vector addition, subtraction in geometric perspektive
Table Of Contents
1. Addition of Two Vectors
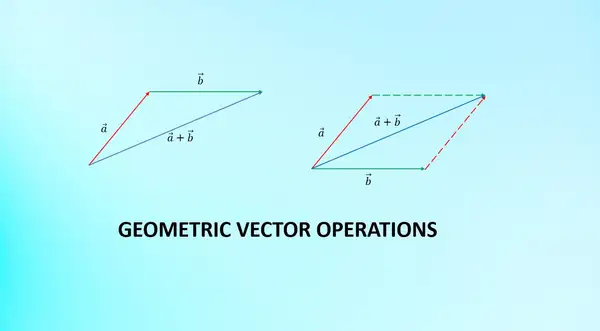
The sum of two or more vectors is called the result vector or resultant. Geometrically, there are 2 rules for adding two vectors, namely:
Triangle rule

Parallelogram rule


On Vector summation occurs:
- Commutative property
$ \overline{a}+\overline{b}=\overline{b}+\overline{a} $ - Associative properties
$ \left( \overline{a}+\overline{b} \right)+\overline{c}=\overline{a}+\left( \overline{b}+\overline{c} \right) $ - Identity element, namely the zero vector
$ \overline{a}+\overline{0}=\overline{a}=\overline{0}+\overline{a} $ - Inverse add
$ \overline{a}+(-\overline{a})=\overline{0} $
2. Resultant of several vectors
Remembering the triangle rule and the associative nature of adding vectors, we can add vectors using polygons.

3. Difference of Two Vectors
The difference between two vectors means adding the first vector to the opposite (negative) second vector.
$$ \overline{a}-\overline{b}=\overline{a}+(-\overline{b})$$
$ \overline{a} $ minus $ \overline{b} $ equals $ \overline{a} $ plus the opposite of $ \overline{b} $ . This is explained geometrically as follows

4. Multiplication of Vectors with Scalars
The product of a vector $ \overline{a} $ with a scalar k is a vector whose length is k times the length of the vector $ \overline{a} $ and whose direction depends on the value of k.
 From image $ \overrightarrow{AB}=\overline{a},\text{ }\overrightarrow{CD}=2\overline{a},\text{ }\overrightarrow{QP}=-\overline{a}, $ dan $ \overrightarrow{KR}=-3\overline{a} $ maka $ \overrightarrow{CD}=2\overrightarrow{AB} $ dan $ \overrightarrow{KR}=3\overrightarrow{QP} $ atau $ \overrightarrow{KR}=-3\overrightarrow{AB} $ .
From image $ \overrightarrow{AB}=\overline{a},\text{ }\overrightarrow{CD}=2\overline{a},\text{ }\overrightarrow{QP}=-\overline{a}, $ dan $ \overrightarrow{KR}=-3\overline{a} $ maka $ \overrightarrow{CD}=2\overrightarrow{AB} $ dan $ \overrightarrow{KR}=3\overrightarrow{QP} $ atau $ \overrightarrow{KR}=-3\overrightarrow{AB} $ .
From this it can be understood that there are 3 possible products of a vector with a scalar k, namely
- If $ k>0 $ then $ k.\overline{a} $ is a vector whose length $ k $ times Vector $ \overline{a} $ and is in the same direction as $ \overline{a} $
- If $ k=0 $ then $ k.\overline{a} $ is a zero Vector
- If $ k<0 $ then $ k.\overline{a} $ is a vector whose length is $ k $ times Vector $ \overline{a} $ and is in the opposite direction to $ \overline{a} $
If $ \overline{a} $ is a non-zero vector and $ n,p\in R $ then it applies:
- $ n\overline{a}=\left| n \right|.\left| \overline{a} \right| $
- $ n(-\overline{a})=-n\overline{a} $
- $ n\overline{a}=\overline{a}n $
- $ (np)\overline{a}=n(p\overline{a}) $
- $ (n+p)\overline{a}=n\overline{a}+p\overline{a} $
- $ n(\overline{a}+\overline{b})=n\overline{a}+n\overline{b} $
5. Position Vector
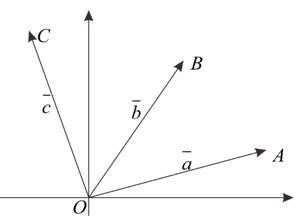
The position vector of point A with respect to center O is written $ \overrightarrow{OA} $ or $ \overline{a} $ . The figure shows the positions of points A, B, and C with respect to center O, written $ \overrightarrow{OA},\overrightarrow{OB}, $ and $ \overrightarrow{OC} $ . The vectors $ \overrightarrow{OA},\overrightarrow{OB}, $ and $ \overrightarrow{OC} $ are called the position vectors of points A, B, and C. The position vectors of points A, B, and C are often written in lower case $ \overline{a},\overline{b}, $ and $ \overline{c} $ .
 Pay attention to ∆ABO, it can be seen that
$$ \begin{align*}
\overrightarrow{AB}=\overrightarrow{AO}+\overrightarrow{OB} \\ \overrightarrow{AB}=-\overrightarrow{OA}+\overrightarrow{OB} \\ \overrightarrow{AB}=\overrightarrow{OB}-\overrightarrow{OA} \end{align*}$$
$ \therefore \overrightarrow{AB}=\overline{b}-\overline{a} $
Pay attention to ∆ABO, it can be seen that
$$ \begin{align*}
\overrightarrow{AB}=\overrightarrow{AO}+\overrightarrow{OB} \\ \overrightarrow{AB}=-\overrightarrow{OA}+\overrightarrow{OB} \\ \overrightarrow{AB}=\overrightarrow{OB}-\overrightarrow{OA} \end{align*}$$
$ \therefore \overrightarrow{AB}=\overline{b}-\overline{a} $
Example
Example of vector drawing
Given the vectors $ \overline{a},\overline{b}, $ and $ \overline{c} $ are depicted as follows
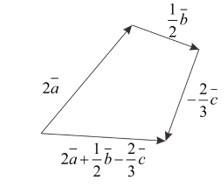
 Draw the vector diagram above showing $ 2\overline{a}+\frac{1}{2}\overline{b}-\frac{2}{3}\overline{c} $
Alternative solutions
Draw the vector diagram above showing $ 2\overline{a}+\frac{1}{2}\overline{b}-\frac{2}{3}\overline{c} $
Alternative solutions
Example of vector proof using addition rules
Prove by the addition rule that $ \overrightarrow{AD}+\overrightarrow{BC}=\overrightarrow{AC}+\overrightarrow{BD} $
Alternative Solution
$$ \begin{align*}
(\overrightarrow{AD}+\overrightarrow{BC})-(\overrightarrow{AC}+\overrightarrow{BD})=\overrightarrow{O}\\ \overrightarrow{AD}+\overrightarrow{BC}-\overrightarrow{AC}-\overrightarrow{BD}=\overrightarrow{O}\\ (\overrightarrow{AD}-\overrightarrow{AC})+(\overrightarrow{BC}-\overrightarrow{BD})=\overrightarrow{O}\\ (\overrightarrow{CA}+\overrightarrow{AD})+(\overrightarrow{DB}-\overrightarrow{BC})=\overrightarrow{O}\\ \overrightarrow{CD}+\overrightarrow{DC}=\overrightarrow{O}\\ \overrightarrow{CC}=\overrightarrow{O}
\end{align*}$$
Jadi, $ \overrightarrow{AD}+\overrightarrow{BC}=\overrightarrow{AC}+\overrightarrow{BD} $ (Terbukti)
Example of geometric proof
In the trapezoid ABCD, the midpoints on sides AB, BC, CD, and DA are given, namely points P, Q, R, and S, as in the picture. Prove that PQRS is a parallelogram.
Alternative solutions
Look at the AC diagonal
$$ \begin{align*}
\overrightarrow{PQ}=\overrightarrow{PB}+\overrightarrow{BQ} \\ \overrightarrow{PQ}=\frac{1}{2}\overrightarrow{AB}+\frac{1}{2}\overrightarrow{BC} \\ \overrightarrow{PQ}=\frac{1}{2}(\overrightarrow{AB}+\overrightarrow{BC}) \\ \overrightarrow{PQ}=\frac{1}{2}\overrightarrow{AC}
\end{align*}$$
$$ \begin{align*}
\overrightarrow{SR}=\overrightarrow{SD}+\overrightarrow{DR} \\ \overrightarrow{PQ}=\frac{1}{2}\overrightarrow{AD}+\frac{1}{2}\overrightarrow{DC} \\ \overrightarrow{PQ}=\frac{1}{2}(\overrightarrow{AD}+\overrightarrow{DC}) \\ \overrightarrow{SR}=\frac{1}{2}\overrightarrow{AC}
\end{align*}$$
This means that $\overrightarrow{PQ}=\overrightarrow{SR}$ and $\overrightarrow{PQ}$ are parallel to $\overrightarrow{SR}$
So, PQRS is a parallelogram.
Example of geometric proof of vectors
Prove that the diagonals of parallelogram OABC intersect each other in the middle
Alternative solutions
Look at the parallelogram OABC beside.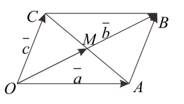 The position vectors of points A, B, and C are $ \overline{a},\overline{b}, $ and $ \overline{c} $ .
The position vectors of points A, B, and C are $ \overline{a},\overline{b}, $ and $ \overline{c} $ .
M midpoint $ \overrightarrow{AC} $ , so that
$$ \begin{align*}
\overrightarrow{OM}&=\overrightarrow{OA}+\overrightarrow{AM} \\ \overrightarrow{OM}&=\overrightarrow{OA}+\frac{1}{2}\overrightarrow{AC} \\ \overrightarrow{OM}&=\overrightarrow{OA}+\frac{1}{2}(\overrightarrow{OC}-\overrightarrow{OA}) \\ \overrightarrow{OM}&=\frac{1}{2}(\overrightarrow{OA}+\overrightarrow{OC}) \\ \overrightarrow{OM}&=\frac{1}{2}(\overline{a}+\overline{c}) \end{align*}$$
The midpoint $ \overrightarrow{OB} $ is determined by $ \frac{1}{2}\overline{b} $ , then
$$ \begin{align*}
\frac{1}{2}\overline{b}&=\frac{1}{2}(\overrightarrow{OA}+\overrightarrow{AB}) \\ \frac{1}{2}\overline{b}&=\frac{1}{2}(\overline{a}+\overrightarrow{OC}) \\ \frac{1}{2}\overline{b}&=\frac{1}{2}(\overline{a}+\overrightarrow{OC}) \\ \frac{1}{2}\overline{b}&=\frac{1}{2}(\overline{a}+\overline{c})
\end{align*}$$
Thus, the midpoint $ \overrightarrow{AC} $ is determined by $ \frac{1}{2}(\overline{a}+\overline{c}) $ and the midpoint $ \overrightarrow{OB} $ is determined by $ \frac{1}{2}\overline{b}=\frac{1}{2}(\overline{a}+\overline{c}) $ . This shows that the diagonals $ \overrightarrow{OB} $ and $ \overrightarrow{AC} $ intersect each other in the middle
Practice Questions
Draw the following vectors
- $ \overline{v}=\overline{a}+\overline{b}-\overline{c} $
- $ \overline{w}=-\frac{2}{3}\overline{a}+\overline{b}-3\overline{c} $
It is known that ABCDE is a regular pentagon
Keep it simple- $ \overrightarrow{AE}+\overrightarrow{EC}+\overrightarrow{CD}-\overrightarrow{AB} $
- $ \overrightarrow{AB}+\overrightarrow{BC}-\overrightarrow{EC}-\overrightarrow{DE} $
If points A, B, and M have position vectors $ \overline{a},\overline{b} $ and $ \overline{m} $ with respect to point O and point M is the midpoint of line segment AB, prove that $ \overline{m}=\frac{1}{2}(\overline{a}+\overline{b}) $
In the following picture, it can be seen that PQRS is a parallelogram. A and B are the midpoints of PQ and PS Jika $ \overrightarrow{RA}=\overline{u} $ dan $ \overrightarrow{RB}=\overline{v} $ , nyatakan:
- $ \overrightarrow{PQ} $ and $ \overrightarrow{RS} $ in the form $ \overline{u} $ and $ \overline{v} $
- $ \overrightarrow{PQ} $ and $ \overrightarrow{RS} $ in the form $ \overline{u} $ and $ \overline{v} $
In ∆ABC, $ \overrightarrow{AB},\overrightarrow{BC} $ and $ \overrightarrow{CA} $ represent the vectors $ \overline{a},\overline{b}, $ and $ \overline{ c} $ . P and Q are the midpoints of BC and CA. Suppose the line passing through Q is parallel to BC and intersects AB at R.
- Prove that $ \overrightarrow{QR} $ represents the Vector $ \frac{1}{2}\overline{c}+k\overline{a} $ for some $ k $
- Prove that $ \overrightarrow{QR} $ represents the Vector $ p\overline{b} $ for some $ p $
- By using $ \overline{a}+\overline{b}+\overline{c}=\overrightarrow{O}; $ prove that if $ (l+k)\overline{a}+\left( l+\frac{1}{2} \right)\overline{c}=\overrightarrow{O}, $ then $ k=\frac {1}{2} $ and $ l=-\frac{1}{2} $